Anh-Dzung Doan
Anh-Dzung Doan
Home
Research
Publications
Patent
Awards
Mentorship
Services
Contact
Light
Dark
Automatic
Localisation
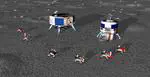
Autonomy and Perception for Space Mining
Our machine learning-based robotic perception for accurate localisation, semantic mapping of the lunar terrain, and object detection for close-range manoeuvring between rovers
In
ICRA 2022
.
(Won 3rd place in NASA Space Robotics Challenge and an Innovation award)
.
Ragav Sachdeva
,
Ravi Hammond
,
James Bockman
,
Alec Arthur
,
Brandon Smart
,
Dustin Craggs
,
Anh-Dzung Doan
,
Thomas Rowntree
,
Elijah Schutz
,
Adrian Orenstein
,
Andy Yu
,
Tat-Jun Chin
,
Ian Reid
PDF
Project
Video
DOI
HM4: Hidden Markov Model With Memory Management for Visual Place Recognition
Achieve a lightweight & scalable solution for place recognition
IEEE Robotics and Automation Letters 2021
.
Anh-Dzung Doan
,
Yasir Latif
,
Tat-Jun Chin
,
Ian Reid
PDF
Project
DOI
Learning to Predict Repeatability of Interest Points
Repeatability of an interest point is not constant but a function of time
In
ICRA 2021
Anh-Dzung Doan
,
Daniyar Turmukhambetov
,
Yasir Latif
,
Tat-Jun Chin
,
Soohyun Bae
PDF
DOI
Visual localization under appearance change: filtering approaches
Propose 2 filtering approaches for visual localization
:
Monte Carlo Visual Localization, and Hidden Markov Model.
Neural Computing and Applications 2020
(Special Issue on Best of DICTA 2019)
.
Anh-Dzung Doan
,
Yasir Latif
,
Tat-Jun Chin
,
Yu Liu
,
Shin-Fang Ch’ng
,
Thanh-Toan Do
,
Ian Reid
PDF
Code
DOI
SPRINT: Subgraph Place Recognition for INtelligent Transportation
Explore the sparsity of topological map to improve the inference time for place recognition
In
ICRA 2020
Yasir Latif
,
Anh-Dzung Doan
,
Tat-Jun Chin
,
Ian Reid
DOI
Visual Localization under Appearance Change: A Filtering Approach
Propose Monte Carlo Visual Localization, which ensures the temporal consistency of localization inference.
In
DICTA 2019
.
Anh-Dzung Doan
,
Yasir Latif
,
Thanh-Toan Do
,
Yu Liu
,
Shin-Fang Ch’ng
,
Tat-Jun Chin
,
Ian Reid
PDF
Code
Dataset
Slides
DOI
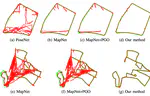
Scalable Place Recognition Under Appearance Change for Autonomous Driving
Highlight the need for continuous data collection in achieving a robust place recognition system. This drives our proposal for a scalable solution based on the Hidden Markov Model.
In
ICCV 2019
Anh-Dzung Doan
,
Yasir Latif
,
Tat-Jun Chin
,
Yu Liu
,
Thanh-Toan Do
,
Ian Reid
PDF
Code
Slides
Video
DOI
Outlier-Robust Manifold Pre-Integration for INS/GPS Fusion
We propose an efficient outlier-robust algorithm to tackle INS and GPS sensor fusion problem for pose estimation.
In
IROS 2019
Shin-Fang Ch’ng
,
Alireza Khosravian
,
Anh-Dzung Doan
,
Tat-Jun Chin
DOI
On-Device Scalable Image-Based Localization via Prioritized Cascade Search and Fast One-Many RANSAC
Develop an on-device system for large-scale visual localisation
IEEE Transactions on Image Processing 2018
.
Ngoc-Trung Tran
,
Dang-Khoa Le Tan
,
Anh-Dzung Doan
,
Thanh-Toan Do
,
Tuan-Anh Bui
,
Mengxuan Tan
,
Ngai-Man Cheung
PDF
DOI
G2D: from GTA to Data
Present a software to collect simulated data from computer game GTA V. Users have fully control of camera poses and environmental conditions.
Anh-Dzung Doan
,
Abdul Mohsi Jawaid
,
Thanh-Toan Do
,
Tat-Jun Chin
PDF
Project
Cite
×